map基础结构
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
// A header for a Go map.
type hmap struct {
buckets unsafe.Pointer // array of 2^B Buckets. may be nil if count==0.
oldbuckets unsafe.Pointer // previous bucket array of half the size, non-nil only when growing
extra *mapextra // optional fields
//下面参数为一些map内部操作所需的size参数,此步不需要入侵了解。
// Make sure this stays in sync with the compiler's definition.
count int // # live cells == size of map. Must be first (used by len() builtin)
flags uint8
B uint8 // log_2 of # of buckets (can hold up to loadFactor * 2^B items)
noverflow uint16 // approximate number of overflow buckets; see incrnoverflow for details
hash0 uint32 // hash seed
nevacuate uintptr // progress counter for evacuation (buckets less than this have been evacuated)
}
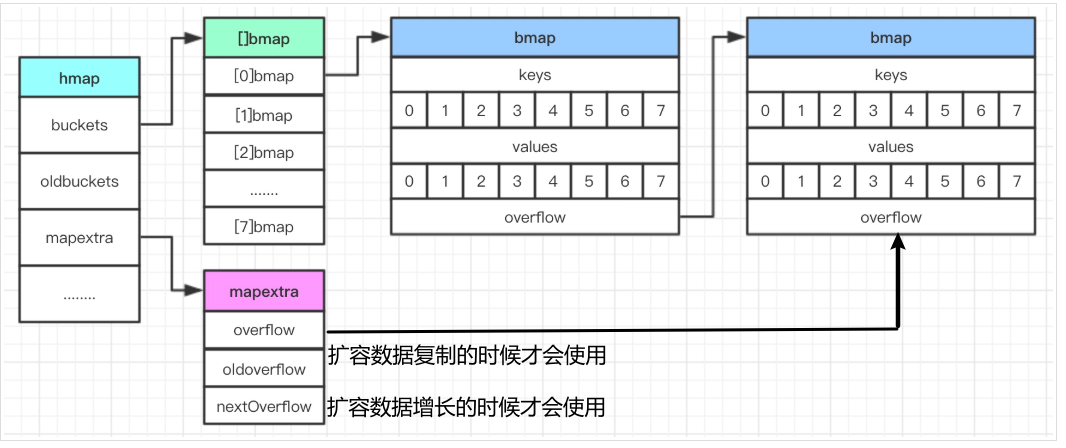
其实map就是上图的结构:
- buckets : 一个大小为2^B大小的桶,里面存放bmap数组
- bmap:一种有8个格子的桶(一定只有8个格子),每个格子存放一对key-value
- overflow:bmap的一个链表指针,用于连接下一个bmap(溢出桶)
- oldbuckets:hmap用于存放老数据(用于扩容时)
- mapextra :用于存放非指针数据(用于优化存储和访问),内部的overflow和oldoverflow实际还是bmap的数组。
Map初始化
func makemap(t *maptype, hint int, h *hmap) *hmap {
// 计算哈希占用的内存是否溢出或者超出能分配的最大值
mem, overflow := math.MulUintptr(uintptr(hint), t.bucket.size)
if overflow || mem > maxAlloc {
hint = 0
}
if h == nil {
h = new(hmap)
}
//调用 fastrand 获取一个随机的哈希种子
h.hash0 = fastrand()
//根据传入的 hint 计算出需要的最小需要的桶的数量 2的B次方个桶
B := uint8(0)
for overLoadFactor(hint, B) {
B++
}
h.B = B
if h.B != 0 {
var nextOverflow *bmap
//使用 runtime.makeBucketArray 创建用于保存桶的数组
h.buckets, nextOverflow = makeBucketArray(t, h.B, nil)
if nextOverflow != nil {
h.extra = new(mapextra)
h.extra.nextOverflow = nextOverflow
}
}
return h
}
所有的理论最简单的说明就是举例子了,来让我们1+1=2吧
Get
Map-Get

-
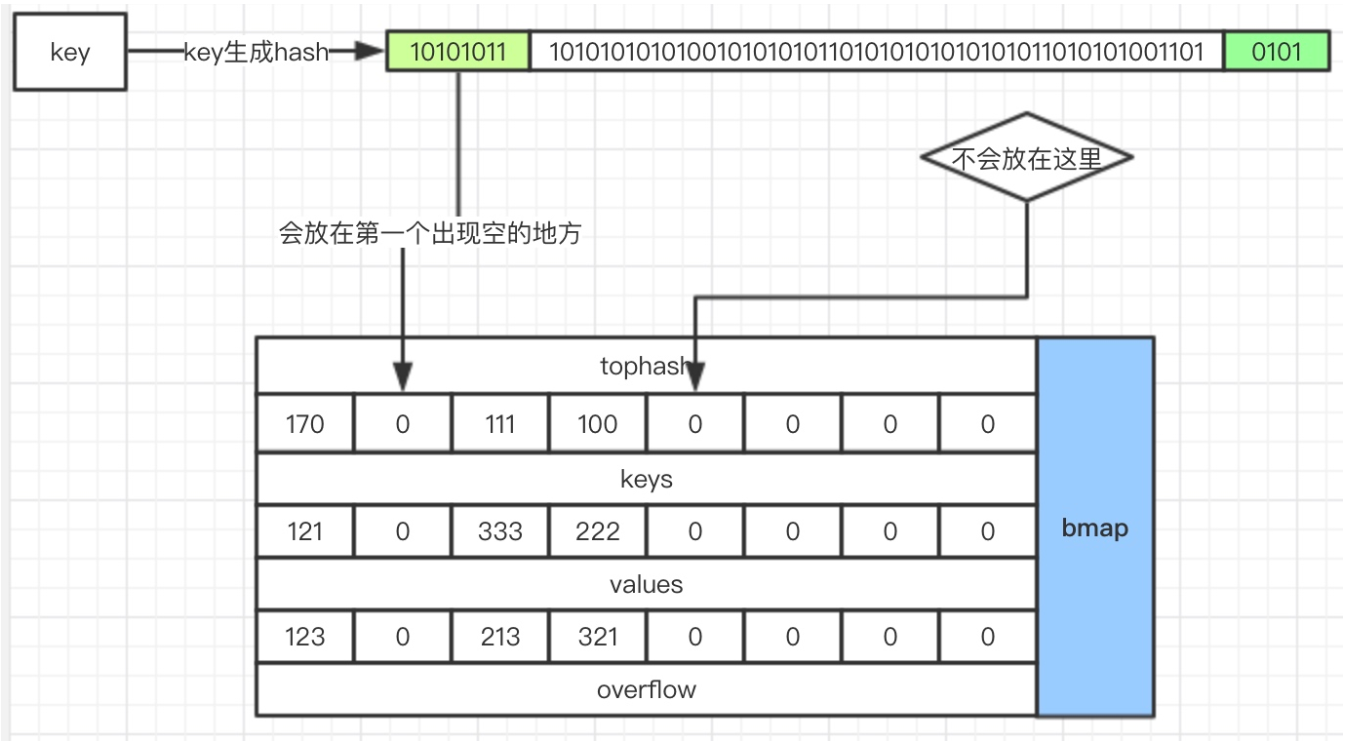
计算出key的hash
-
根据最后的“B”位来确定在哪个桶(如果B为4,B为4,就有16个桶,看4位,即:0101用十进制表示为5,所以在5号桶)
-
找到桶子后,根据key的前8位快速确定是在哪个格子(额外说明一下,在bmap中存放了每个key对应的tophash,是key的前8位)
-
最终还是需要比对key完整的hash是否匹配,如果匹配则获取对应value
-
如果都没有找到,就去下一个overflow找
注:第二步的如果B为2,即只看后两位,01:即在一号桶。
源码重点分析:(不为源码全部内容,只选取部分重点流程代码分析)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
func mapaccess1(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
...
...
...
//计算key的hash值
hash := alg.hash(key, uintptr(h.hash0))
//通过B计算桶的位置
m := bucketMask(h.B)
b := (*bmap)(add(h.buckets, (hash&m)*uintptr(t.bucketsize)))
if c := h.oldbuckets; c != nil {
if !h.sameSizeGrow() {
// There used to be half as many buckets; mask down one more power of two.
m >>= 1
}
oldb := (*bmap)(add(c, (hash&m)*uintptr(t.bucketsize)))
if !evacuated(oldb) {
b = oldb
}
}
//取出key的前8位作为tophash
top := tophash(hash)
bucketloop:
for ; b != nil; b = b.overflow(t) {
//循环查找当前桶的格子,找不到调到下一个溢出栈
for i := uintptr(0); i < bucketCnt; i++ {
//对比tophash是否一致
if b.tophash[i] != top {
if b.tophash[i] == emptyRest {
break bucketloop
}
continue
}
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
if t.indirectkey() {
k = *((*unsafe.Pointer)(k))
}
//对比hash是否一致
if alg.equal(key, k) {
e := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
if t.indirectelem() {
e = *((*unsafe.Pointer)(e))
}
return e
}
}
}
return unsafe.Pointer(&zeroVal[0])
}
Put
Map-Put
新的key-value存入
- 通过key的后“B”位确定是哪一个桶
- 通过key的前8位快速确定是否已经存在
- 最终确定存放位置,如果8个格子已经满了,没地方放了,那么就重新创建一个bmap作为溢出桶连接在overflow
旧的key-value覆盖
其中 inserti 表示目标元素的在桶中的索引,insertk 和 val 分别表示键值对的地址
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
var inserti *uint8
var insertk unsafe.Pointer
var val unsafe.Pointer
//遍历比较桶中存储的 `tophash` 和键的哈希,如果找到了相同结果就会获取目标位置的地址并返回
bucketloop:
for {
for i := uintptr(0); i < bucketCnt; i++ {
if b.tophash[i] != top {
if isEmpty(b.tophash[i]) && inserti == nil {
inserti = &b.tophash[i]
insertk = add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
val = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))
}
if b.tophash[i] == emptyRest {
break bucketloop
}
continue
}
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
//获得目标地址之后会直接通过算术计算进行寻址获得键值对 `k` 和 `val
if !alg.equal(key, k) {
continue
}
val = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.valuesize))
goto done
}
ovf := b.overflow(t)
if ovf == nil {
break
}
b = ovf
}
Map扩容
扩容的方式有以下两种:
- 相同容量扩容
- 翻倍容量扩容 有两种情况会出现,第一种出现的情况是:因为map不断的put和delete,出现了很多空格,这些空格会导致bmap很长,但是中间有很多空的地方,扫描时间变长。所以第一种扩容实际是一种整理,将数据整理到前面一起。第二种呢:就是真的不够用了,扩容两倍。
扩容条件:
装载因子
如果你看过Java的HashMap实现,就知道有个装载因子,同样的在golang中也有,但是不一样哦。装载因子的定义是这个样子:
1
loadFactor := count / (2^B)
其中count为map中元素的个数,B就是之前个那个“B”,也就是(map中元素的个数)/(map当前桶的个数)
扩容条件1
装载因子 > 6.5(这个值是源码中写的) 其实意思就是,桶只有那么几个,但是元素很多,证明有很多溢出桶的存在(可以想成链表拉的太长了),那么扫描速度会很慢,就要扩容。
扩容条件2
overflow 的 bucket 数量过多:当 B 小于 15,如果 overflow 的 bucket 数量超过 2^B ;当 B >= 15,如果 overflow 的 bucket 数量超过 2^15 。源码里面有个判断函数:tooManyOverflowBuckets,有兴趣的可以一看
其实意思就是,可能有一个单独的一条链拉的很长,溢出桶太多了,说白了就是,加入的key不巧,后B位都一样,一直落在同一个桶里面,这个桶一直放,虽然装载因子不高,但是扫描速度就很慢。
扩容条件3
当前正在扩容
相同容量扩容
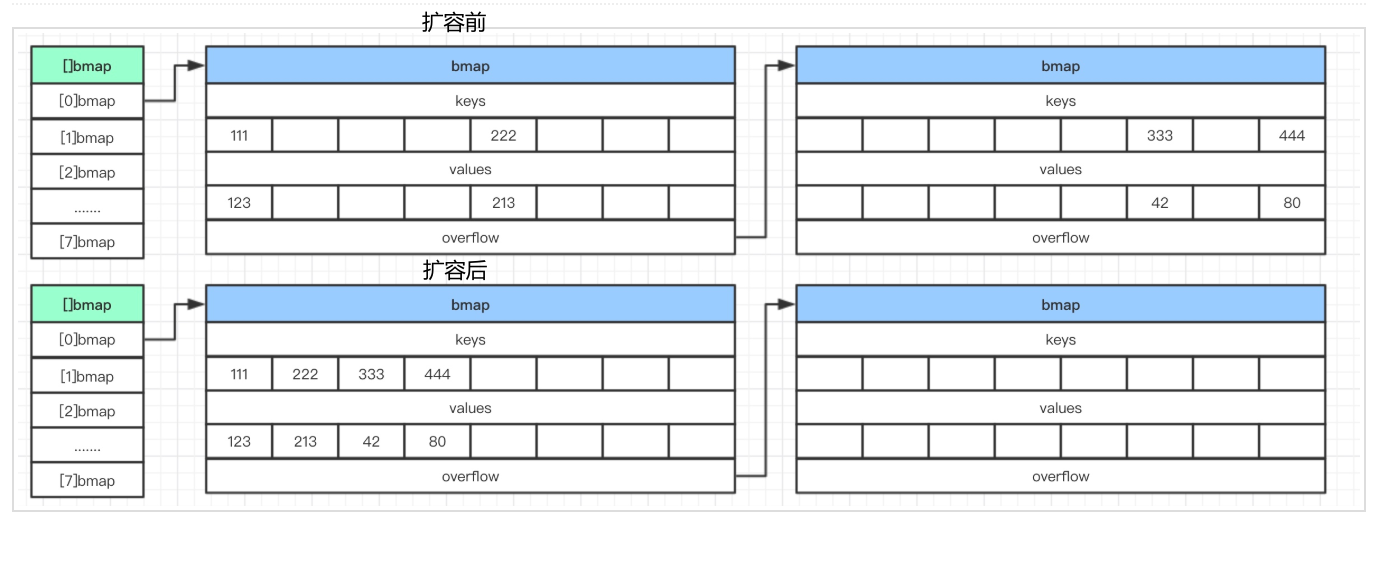
相同容量的扩容,实际上就是一种整理,将分散的数据集合到一起,提高扫描效率。
翻倍容量扩容
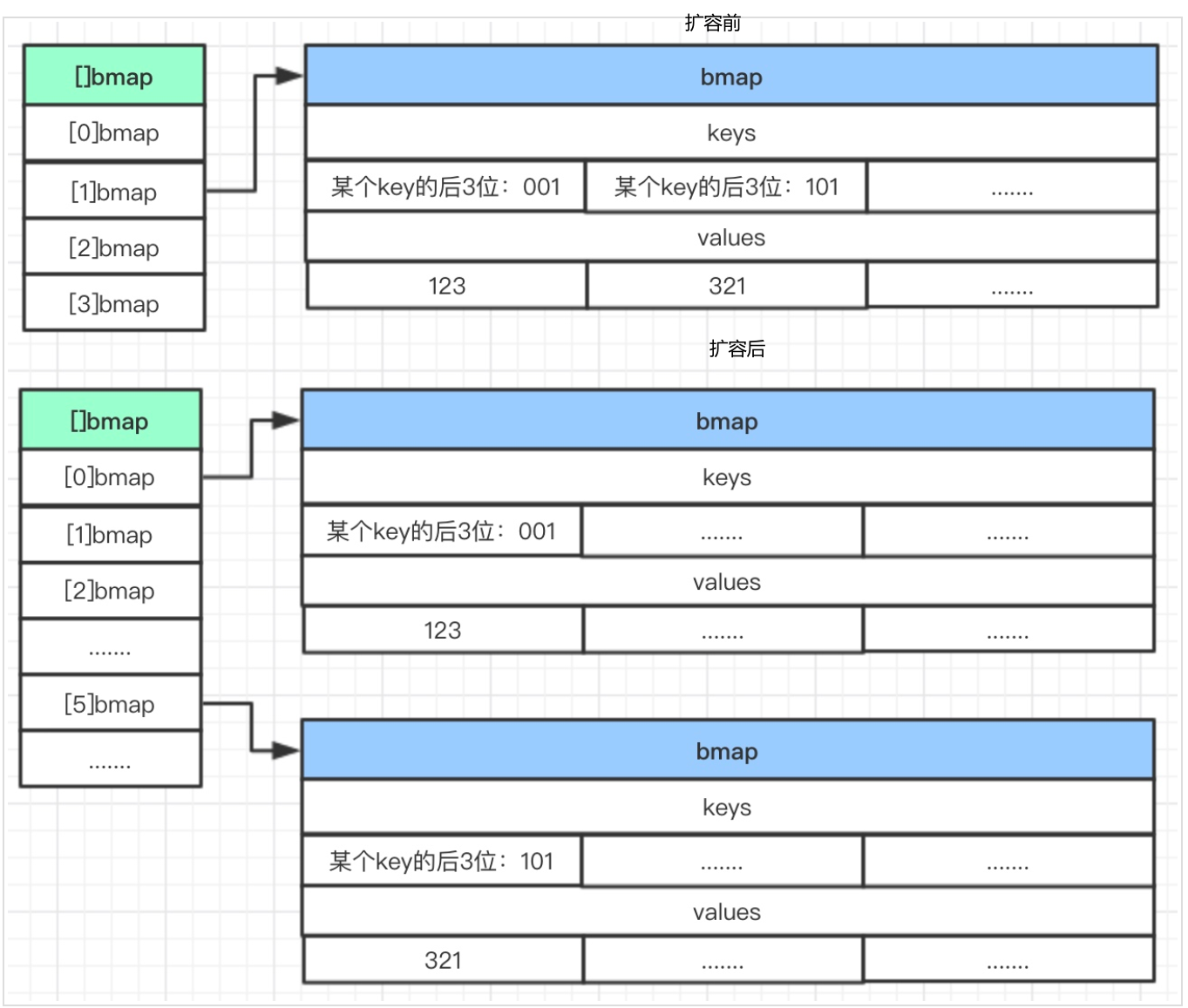
双倍扩容同时会带来元素的整理,如果有两个key后三位分别是001和101,当B=2时,只有4个桶,只看最后两位,这两个key后两位都是01所以在一个桶里面;扩容之后B=3,就会有8个桶,看后面三位,于是它们就分到了不同的桶里面。
图解runtime.evacuate流程:
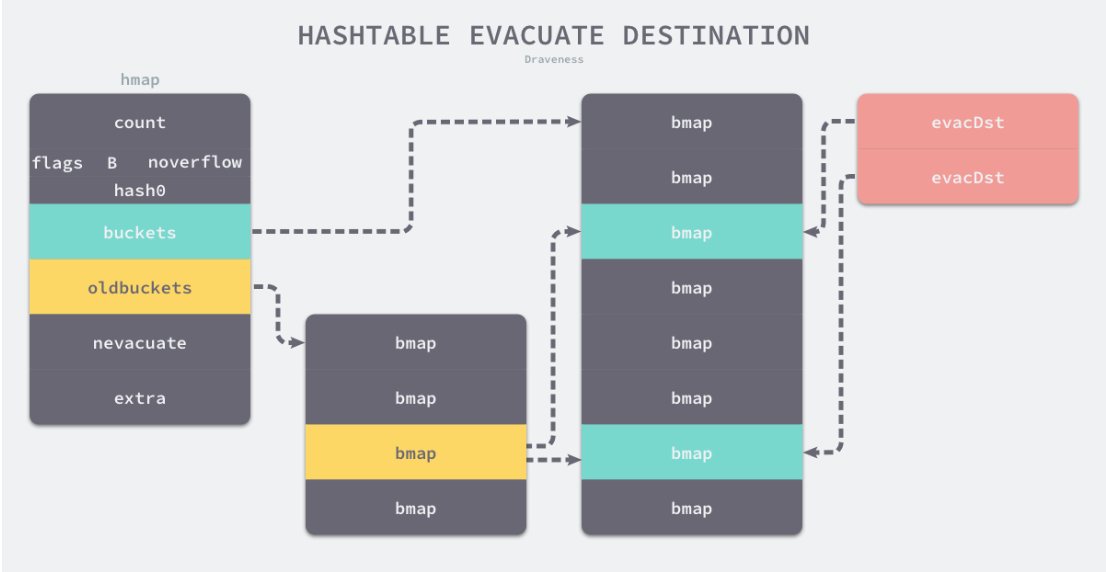
- 扩容不是一次性完成的,还记的我们hmap一开始有一个oldbuckets吗?是先将老数据存到这个里面
- 每次搬运1到2个bucket,当插入或修改、删除key触发
- 扩容之后肯定会影响到get和put,遍历的时候肯定会先从oldbuckets拿,put肯定也要考虑是否要放到新产生的桶里面去
golang 中的map为什么说是非线程安全的
golang的map 跟hash map 是一样的,但是go的分配过程又有自己独特的方式。可找下golang map 原理的文章看下。但是为什么说map 是非线程安全的呢?
因为hash map 的内存是按照2的倍数开辟的,当前面开辟的内存不够的时候,会新开辟一段内存,将原来内存的数据转移到新的内存块中,这个过程是没有加锁的,如果这个时候同时有个读的线程过来获取这块内存数据,就会出现安全问题。
所以多个goroutine同时操作map的时候可能会出现concurrent map writes 的问题,自己实现一个加好读写锁的map结构,建议直接用golang 的sync.Map。性能好,同时简单易用。
写在最后:
JavaMap与GolangMap对比:
我们常见的map如java中的map是直接拿数组,数组中直接对应出了key-value,而在golang中,做了多加中间一层,buckets;java中如果key的哈希相同会采用链表的方式连接下去,当达到一定程度会转换红黑树,golang中直接类似链表连接下去,只不过连接下去的是buckets。
Go的Map线程不安全性,用锁实现线程安全操作:
1
2
3
4
5
6
type SafeMap struct {
data map[string]string
*sync.RWMutex
}
Golang Map 个人问题:
map Buckets 最大size是 2的15次方 问题,既然hmap是用链表相连,为什么每次遍历map的时候顺序不一直在,是通过每次产生的随机数来决定元素的顺序?